今日!ついに!足回りが完成しました!!
 |
| ギアボックス一体型?の機体 |
これでソフトウエア班の活動も活発になりそうです。(完成が遅れて申し訳なかったです...)
この見慣れないタイヤはメカナムホイールというもので、ホイールの軸と45°ずれた樽状のローラーを使うことで、横方向に移動できます。
方向転換せずに縦横無尽にロボットが駆けまわることで時間の短縮やコンパクトな動きを実現できます。
もう一つ
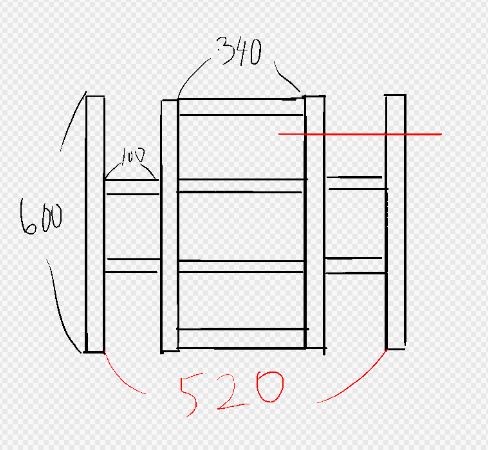
コンテナを上下させるためのレールが完成しました。
アルミフレームとベアリングを用いたもので、市販品を買うより相当コストを抑えることが出来ました。
あとはこの前にアームを取り付け、昇降用のウインチをつけてアーム周りは完成です。
ちなみに、タイトルのShogunというのはロボットの名前です。将軍です。
土曜日はいよいよコントローラを用いた足回りの動作確認です!